Velocity Control
Feedforward and Feedback Loops for Velocity Control in VEX Robotics
Overview
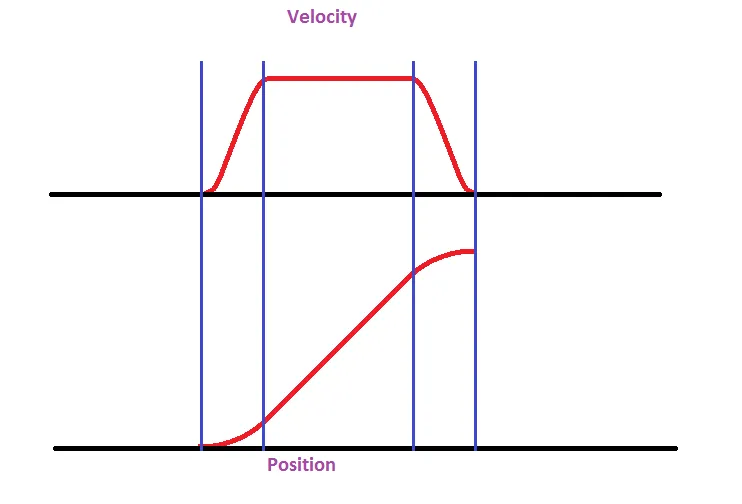
In an effort to replicate the 2018 VEX Robotics World Champions 5225A, we decided to try motion profiling. Essentially, velocity control would be required to control the base. After much research, we decided to use a PF loop (PIDF loop without I and D).
Feedforward Loop (F)
The feedforward loop is simple. Take a naive approach. Let’s assume power is directly proportional to velocity (obviously it is not). Whenever we set a new velocity setpoint, we should set the power as kF * setpoint. kF can easily be measured. First, let’s set a power where our wheels do not slip - maxPower. We then run the base at this power and get the maximum velocity - maxVel. Since we are going to set power = kF * targetVel, kF = maxPower/maxVel. We can then set power = kF * targetVel every time the setpoint changes. This serves as an estimate.
Feedback Loop (P)
The feedback loop is the proportional component of a PID loop. This is integrative - keep adding to the existing power. After using F to set the initial power, we now take error = actualVel-targetVel. We then set the motor power as follows power += actualVel-targetVel. This would slowly move our power towards the desired velocity. Just like a normal position PID loop, we increase P slowly until results are reasonably stable.
Conclusion
This article may be short and simple. However, tuning a velocity PF loop is harder than a PD loop (in my opinion, probably because I’ve had more experience tuning PD loops). It is still a useful skill as velocity PID loops are used everywhere in real life, one simple example is the air conditioner or fan you are sitting under.
Alternative
Another solution not discussed was a Takeback Half Algorithm (TBH). This approach is relatively less documented than PID but still widely used, especially in flywheel control.
Resources
https://github.com/FRC-Team-955/Team955RobotLib/wiki/PIDF-Loop